BasicBSpline.jl
Basic (mathematical) operations for B-spline functions and related things with Julia.
![]()
![]()
![]()
![]()
![]()
![]()
Summary
This package provides basic mathematical operations for B-spline.
- B-spline basis function
- Some operations for knot vector
- Some operations for B-spline space (piecewise polynomial space)
- B-spline manifold (includes curve, surface and solid)
- Refinement algorithm for B-spline manifold
- Fitting control points for a given function
Comparison to other B-spline packages
There are several Julia packages for B-spline, and this package distinguishes itself with the following key benefits:
- Supports all degrees of polynomials.
- Includes a refinement algorithm for B-spline manifolds.
- Delivers high-speed performance.
- Is mathematically oriented.
- Provides a fitting algorithm using least squares. (via BasicBSplineFitting.jl)
- Offers exact SVG export feature. (via BasicBSplineExporter.jl)
If you have any thoughts, please comment in:
Installation
Install this package via Julia REPL's package mode.
]add BasicBSplineQuick start
B-spline basis function
The value of B-spline basis function $B_{(i,p,k)}$ can be obtained with bsplinebasis₊₀.
\[\begin{aligned} {B}_{(i,p,k)}(t) &= \frac{t-k_{i}}{k_{i+p}-k_{i}}{B}_{(i,p-1,k)}(t) +\frac{k_{i+p+1}-t}{k_{i+p+1}-k_{i+1}}{B}_{(i+1,p-1,k)}(t) \\ {B}_{(i,0,k)}(t) &= \begin{cases} &1\quad (k_{i}\le t< k_{i+1})\\ &0\quad (\text{otherwise}) \end{cases} \end{aligned}\]
julia> using BasicBSpline
julia> P3 = BSplineSpace{3}(KnotVector([0.0, 1.5, 2.5, 5.5, 8.0, 9.0, 9.5, 10.0]))
BSplineSpace{3, Float64, KnotVector{Float64}}(KnotVector([0.0, 1.5, 2.5, 5.5, 8.0, 9.0, 9.5, 10.0]))
julia> bsplinebasis₊₀(P3, 2, 7.5)
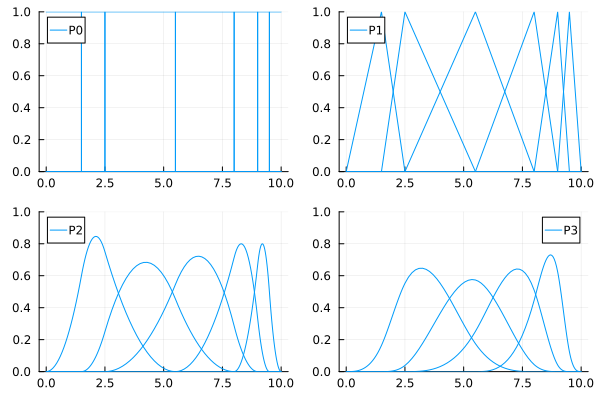
0.13786213786213783BasicBSpline.jl has many recipes based on RecipesBase.jl, and BSplineSpace object can be visualized with its basis functions. (Try B-spline basis functions in Desmos)
using BasicBSpline
using Plots
k = KnotVector([0.0, 1.5, 2.5, 5.5, 8.0, 9.0, 9.5, 10.0])
P0 = BSplineSpace{0}(k) # 0th degree piecewise polynomial space
P1 = BSplineSpace{1}(k) # 1st degree piecewise polynomial space
P2 = BSplineSpace{2}(k) # 2nd degree piecewise polynomial space
P3 = BSplineSpace{3}(k) # 3rd degree piecewise polynomial space
gr()
plot(
plot(P0; ylims=(0,1), label="P0"),
plot(P1; ylims=(0,1), label="P1"),
plot(P2; ylims=(0,1), label="P2"),
plot(P3; ylims=(0,1), label="P3"),
layout=(2,2),
)
You can visualize the differentiability of B-spline basis function. See Differentiability and knot duplications for details.
B-spline manifold
using BasicBSpline
using StaticArrays
using Plots
## 1-dim B-spline manifold
p = 2 # degree of polynomial
k = KnotVector(1:12) # knot vector
P = BSplineSpace{p}(k) # B-spline space
a = [SVector(i-5, 3*sin(i^2)) for i in 1:dim(P)] # control points
M = BSplineManifold(a, P) # Define B-spline manifold
gr(); plot(M)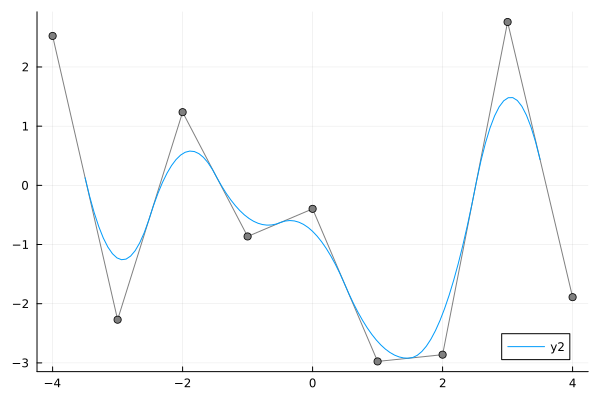
Rational B-spline manifold (NURBS)
using BasicBSpline
using LinearAlgebra
using StaticArrays
using Plots
plotly()
R1 = 3 # major radius of torus
R2 = 1 # minor radius of torus
p = 2
k = KnotVector([0,0,0,1,1,2,2,3,3,4,4,4])
P = BSplineSpace{p}(k)
a = [normalize(SVector(cosd(t), sind(t)), Inf) for t in 0:45:360]
w = [ifelse(isodd(i), √2, 1) for i in 1:9]
a0 = push.(a, 0)
a1 = (R1+R2)*a0
a5 = (R1-R2)*a0
a2 = [p+R2*SVector(0,0,1) for p in a1]
a3 = [p+R2*SVector(0,0,1) for p in R1*a0]
a4 = [p+R2*SVector(0,0,1) for p in a5]
a6 = [p-R2*SVector(0,0,1) for p in a5]
a7 = [p-R2*SVector(0,0,1) for p in R1*a0]
a8 = [p-R2*SVector(0,0,1) for p in a1]
M = RationalBSplineManifold(hcat(a1,a2,a3,a4,a5,a6,a7,a8,a1), w*w', P, P)
plot(M; controlpoints=(markersize=2,))Refinement
h-refinement (knot insertion)
Insert additional knots to knot vectors without changing the shape.
k₊ = (KnotVector([3.1, 3.2, 3.3]), KnotVector([0.5, 0.8, 0.9])) # additional knot vectors
M_h = refinement(M, k₊) # refinement of B-spline manifold
plot(M_h; controlpoints=(markersize=2,))p-refinement (degree elevation)
Increase the polynomial degrees of B-spline manifold without changing the shape.
p₊ = (Val(1), Val(2)) # additional degrees
M_p = refinement(M, p₊) # refinement of B-spline manifold
plot(M_p; controlpoints=(markersize=2,))Fitting B-spline manifold
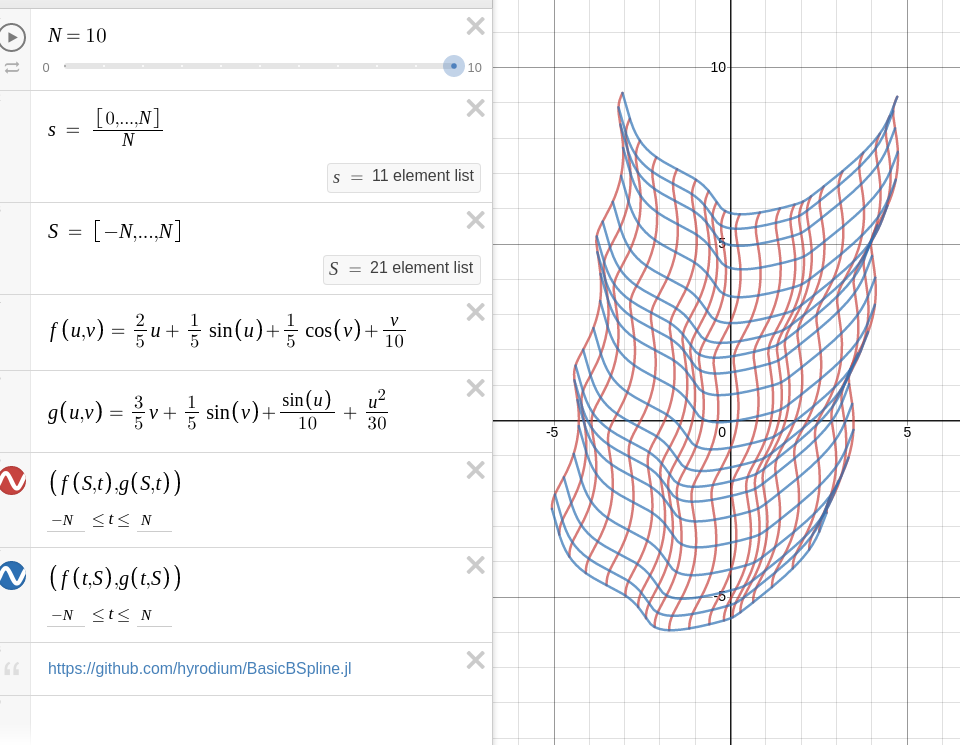
The next example shows the fitting for the following graph on Desmos graphing calculator!
using BasicBSplineFitting
p1 = 2
p2 = 2
k1 = KnotVector(-10:10)+p1*KnotVector([-10,10])
k2 = KnotVector(-10:10)+p2*KnotVector([-10,10])
P1 = BSplineSpace{p1}(k1)
P2 = BSplineSpace{p2}(k2)
f(u1, u2) = SVector(2u1 + sin(u1) + cos(u2) + u2 / 2, 3u2 + sin(u2) + sin(u1) / 2 + u1^2 / 6) / 5
a = fittingcontrolpoints(f, (P1, P2))
M = BSplineManifold(a, (P1, P2))
gr()
plot(M; aspectratio=1)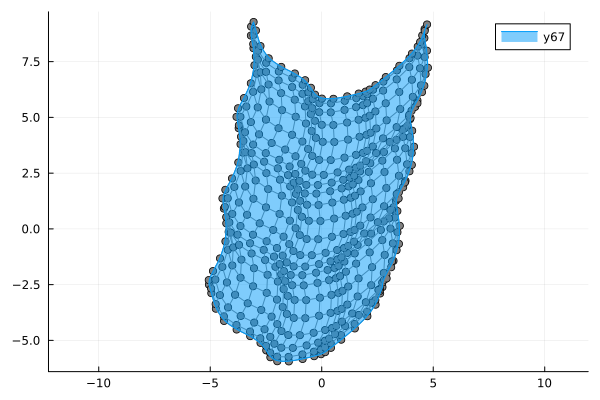
If the knot vector span is too coarse, the approximation will be coarse.
p1 = 2
p2 = 2
k1 = KnotVector(-10:5:10)+p1*KnotVector([-10,10])
k2 = KnotVector(-10:5:10)+p2*KnotVector([-10,10])
P1 = BSplineSpace{p1}(k1)
P2 = BSplineSpace{p2}(k2)
f(u1, u2) = SVector(2u1 + sin(u1) + cos(u2) + u2 / 2, 3u2 + sin(u2) + sin(u1) / 2 + u1^2 / 6) / 5
a = fittingcontrolpoints(f, (P1, P2))
M = BSplineManifold(a, (P1, P2))
plot(M; aspectratio=1)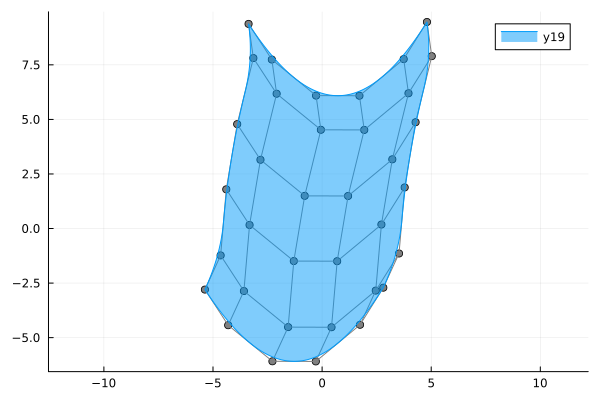
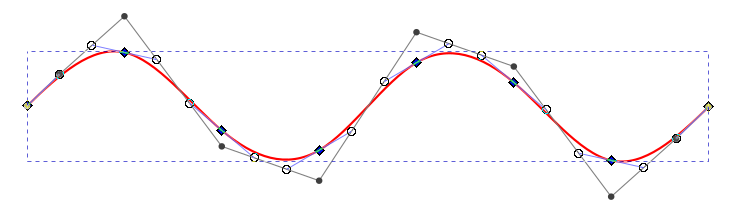
Draw smooth vector graphics
using BasicBSpline
using BasicBSplineFitting
using BasicBSplineExporter
p = 3
k = KnotVector(range(-2π,2π,length=8))+p*KnotVector([-2π,2π])
P = BSplineSpace{p}(k)
f(u) = SVector(u,sin(u))
a = fittingcontrolpoints(f, P)
M = BSplineManifold(a, P)
save_svg("sine-curve.svg", M, unitlength=50, xlims=(-8,8), ylims=(-2,2))
save_svg("sine-curve_no-points.svg", M, unitlength=50, xlims=(-8,8), ylims=(-2,2), points=false)

This is useful when you edit graphs (or curves) with your favorite vector graphics editor.
See Plotting smooth graphs with Julia for more tutorials.